HI THERE!
I’m Hemanth Joseph Raj
Robotics Engineer & Developer based in the US.
- 3+ yrs Experience
- 17+ Projects
- UMD Alum Go Terps!
I am an enthusiastic engineer with a Master's degree in Robotics. I currently work as a Robotics Solutions Engineer for Ati Motors.
An AMR startup creating headway in the world of industry automation. I work on catering and customizing our AMR solutions
to the customer's unique needs. I am eager to bridge the gap between theory and
practice by leveraging my knowledge and bringing innovative solutions to the forefront through your organization.
I am trained in the core Robotics domains of Modelling, Controls, Path Planning, Computer Vision and Deep Learning.
I've also an interest in Program and Product Management within the context of Robotics Engineering.
In my free time, I love to cook, watch true crime documentaries, and play MMORPG games.
GPA 3.6 / 4.0
70.3 % - First Class with Distinction.
Simulating a TurtleBot3 in Gazebo environment for Searchh and Rescue. The Explorer robot will use SLAM to explore the environment and save the locations of the victims indicated by ArUco markers. Follower robot visits each location one by one.
Read More
A deep Convolutional Neural Network architecture was built to detect breast cancer from histopathological slide images of breast tissue. The model performed well with an Area Under the Curve (AUC) of around 0.96.
Read More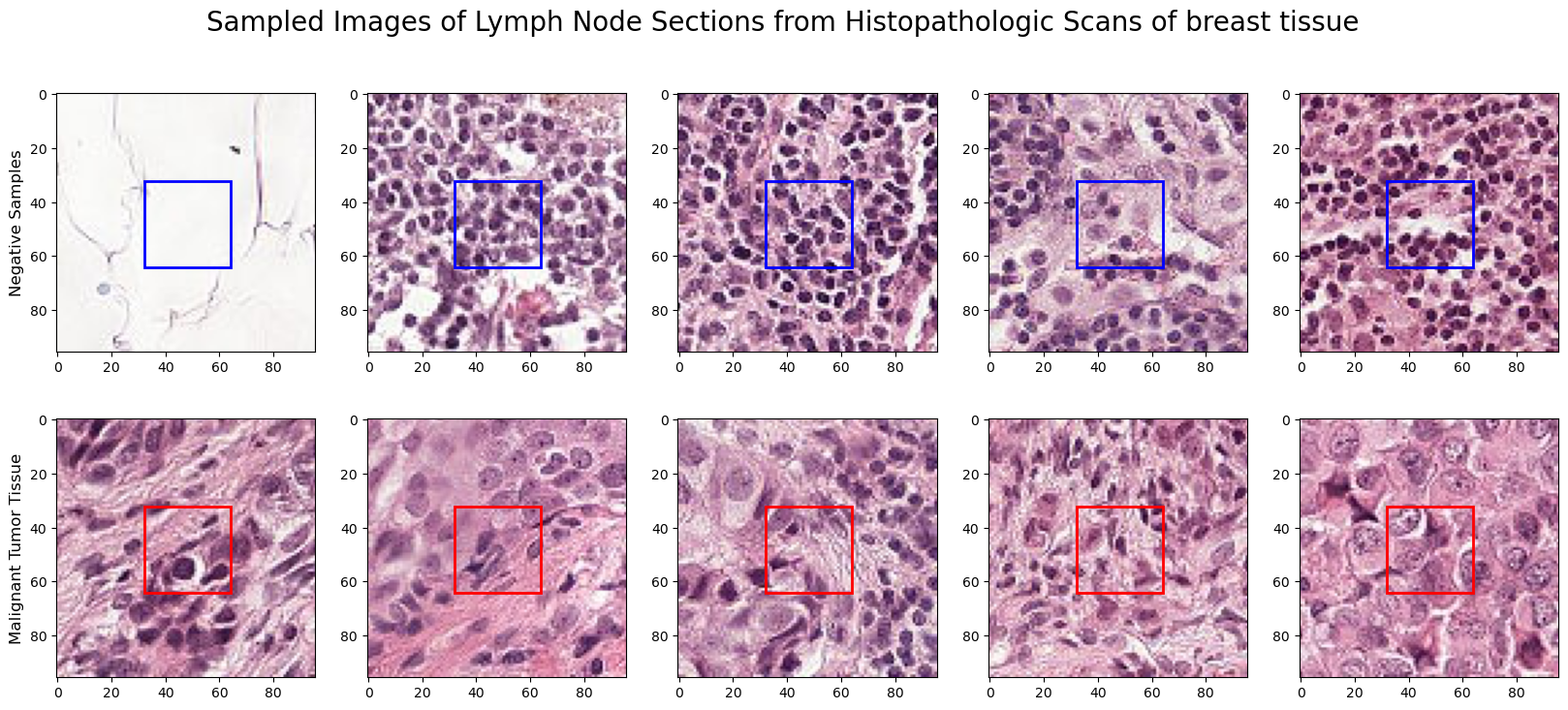
Performed Monocular Visual Odometry by using the obtained camera pose to estimate the distance traveled by the robot for Oxford Robot Car and a custom video dataset. An implementation was also done by simulating a Turtlebot3 in Gazebo.
Read More
Read video frame-by-frame, perform homography, warp perspective, detect the lane lines and fit a polynomial curve on it and based on the curvature, and predict the direction of motion of the vehicle.
Read More